弾性衝突円盤アプレットの衝突計算について、悲しいことに式を求めるのにかなり時間を費やしたので、忘れないように記録する。これが無いと、自分でもソースコードを理解できなくなってしまう。
まず直線上の衝突について考える。物体1,2の質量をm1,m2、衝突前の速度をv1,v2、衝突後の速度をv1',v2'とすると、完全弾性衝突の場合、運動量保存の法則より

が成り立つ。速度変化に注目してこれを整理すると、
が得られる。これは、
 ---(1)
---(1)
と置くと、
 ---(2)
---(2)
 ---(3)
---(3)
と整理できる。
次に平面上の衝突について考える。
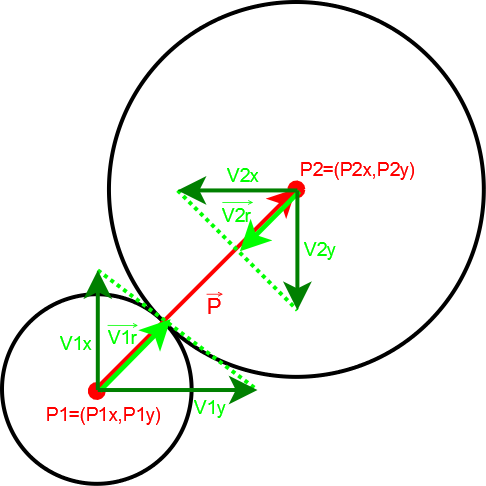
図のように円盤と円盤が衝突する場合の速度変化については、円盤の中心同士を結ぶ線上の方向の
速度が衝突によって変化し、衝突方向でない速度成分は変化しないので、衝突方向の速度V1r、V2rについて、上記の式(1)~(3)により速度の変化を求めれば良い。つまり、 Pを円盤の中心間を結ぶベクトル、V1,V2を円盤1,2の速度ベクトル、v1r,v2rを円盤1,2のP方向の速度、V1,v1rの衝突後の速度をそれぞれV1',v1r'とすると、円盤の速度変化は
である。
v1rの計算については、θをPとV1の間の角度とすると、

であり、PとV1との内積は

だから、
で求められる。同様に
となる。
直線の場合の式(1)と同様に

と置くと、(2)より

となる。vtmpとv1rの両方に1/|P|が入っているので、計算上の便宜のため、
と置き直すと、
が得られる。2次元のベクトルをX軸成分とY軸成分に分けて

とスカラー表記にすると、

なので、円盤同士の衝突による速度変化は、




で求められることがわかる。
谷口
突然の質問失礼いたします。
直線の場合の式(1)と同様に・・・と置くとの次の式は左辺がスカラーで右辺がベクトルになっているように思われるのですがいかがでしょうか?
ynomura
ご指摘ありがとうございます。左辺を書き間違えていました。v1r'-v1rでなく、V1'-V1でした。
v1r'-v1rとなってた箇所を修正しました。